Véhicule autonome : prêts pour les algorithmes qui apprennent tout seuls à conduire ?
Publié par Ombelliscience -, le 11 mai 2018 8.8k

La conduite autonome est une thématique donnant lieu à beaucoup de discussions et de questionnements. En effet, il s'agit d'une voie d'innovation ayant par définition le potentiel de complètement transformer notre expérience du transport automobile. Sera-t-il bientôt absurde de dire qu'on est "au volant" de notre voiture ?
Avant tout, la conduite autonome constitue un champ dynamique de recherche et développement. Si des entreprises comme Waymo (Google), Uber et Tesla sont les plus proéminentes sur ce marché, de nombreux grands constructeurs automobiles ont manifesté de l'intérêt pour la conduite autonome. Pour faire le point sur cette thématique, Ombelliscience a rencontré Édouard Leurent, doctorant à l'INRIA à Lille (thèse CIFRE avec Renault), ainsi que Philippe Xu, maître de conférences au laboratoire Heudiasyc (UMR CNRS 7253) de l'UTC à Compiègne.
Pourquoi la conduite autonome ?
L'argument mis en avant par les promoteurs est clairement l'amélioration de la sécurité routière. Et pour cause, 9 accidents de la route sur 10 sont liés au conducteur au travers d'un ou plusieurs facteurs, et il y a de bonnes raisons de penser que la machine, toujours attentive, jamais fatiguée, jamais ivre et respectant le code de la route, puisse faire mieux.
Augmenter l'autonomie des véhicules est donc une voie intéressante pour poursuivre la tendance positive observée en sécurité routière. En effet, si les accidents de la route en France ont fait 3456 morts en 2017, cela représente une baisse de 80% par rapport au pic atteint dans les années 70 (et ce en dépit du fait que l'usage de la voiture se soit largement développé depuis). De nombreux facteurs viennent expliquer ce déclin : fiabilité accrue des véhicules, ceinture de sécurité obligatoire, airbag, limitations de vitesse, réglementation sur l'alcoolémie, sensibilisation... Pour autant, les mesures les plus simples et efficaces ayant déjà été prises, les progrès seront de plus en plus difficiles à obtenir.
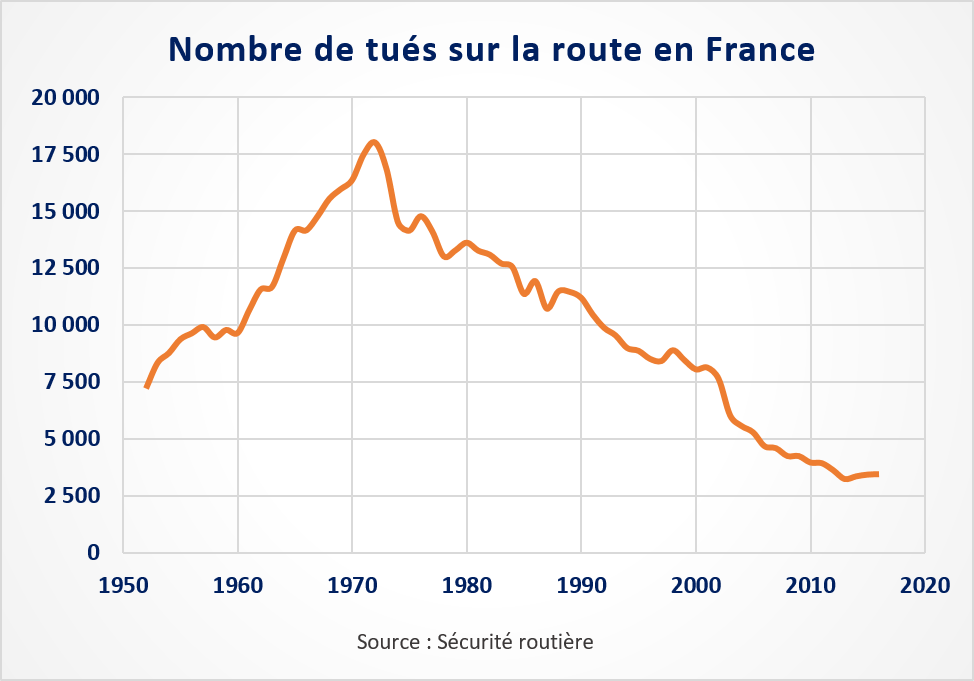
depuis le début des relevés de la Sécurité routière.
La machine a non seulement un temps de réaction plus faible que l'humain, mais peut également augmenter sa perception de la route en communiquant avec d'autres véhicules ou avec l'infrastructure routière. "Une caméra sur un rond-point pourrait indiquer à l'avance si la voie est libre, des véhicules pourraient s'échanger des informations sur leurs positions et leurs vitesses, ce qui serait utile en cas de mauvaise visibilité" indique Philippe Xu qui travaille sur ces thématiques.
En évitant des accidents, on évite non seulement de faire des victimes, mais aussi des dégâts, et donc des frais de réparation. Un autre avantage souvent cité est l'optimisation de la conduite des véhicules et du trafic, et donc la diminution de la consommation, de la pollution de l'air et des émissions de CO2.
À cause des avantages mis en avant, l'arrivée de véhicules autonomes est perçue assez positivement par les autorités. Les États-Unis, et en particulier certains États comme la Californie ou l'Arizona, offrent un cadre réglementaire favorable à leur développement. L'Allemagne, ainsi que la France, semblent emboîter le pas.

Image par Grendelkhan (CC BY-SA 4.0)
La conduite autonome s'inscrit dans la continuité de fonctionnalités d'aide à la conduite déjà commercialisées, comme le régulateur de vitesse. Il s'agit du premier stade d'autonomie, celle-ci étant décrite à l'aide d'une échelle à 5 niveaux. En dehors de navettes dans des réseaux fermés, le véhicule complètement autonome n'existe pas encore : on se situe au stade 3 au mieux, et la présence d'un humain pouvant à tout moment reprendre le volant est requise. La recherche s'attache donc actuellement à développer des systèmes toujours plus autonomes.
Leçons de conduite virtuelles
Classiquement, pour concevoir des machines capables de conduire, les ingénieurs modélisent les situations au cas par cas et en déduisent les lois de commande à intégrer de façon explicite dans le programme de conduite ("s'il y a un obstacle, freine"). Cette approche fonctionne bien pour des tâches simples prises isolément, comme le suivi d'une voie, mais pèche par l'absence de flexibilité du véhicule qui ne pourra réagir qu'au nombre limité de situations prévues par les concepteurs.
Afin d'améliorer la performance, Édouard Leurent se penche comme d'autres chercheurs sur un paradigme très différent : l'apprentissage par renforcement. Il n'est pas question d'entraîner la machine à copier la conduite des êtres humains. Plutôt, on place (virtuellement) l'algorithme aux commandes d'un véhicule avec un itinéraire donné, et on le laisse conduire sans lui indiquer à l'avance ce qu'il doit faire. Puis, à chacune de ses actions, on lui attribue une récompense chiffrée lui donnant une mesure de son succès. En essayant de maximiser sa récompense sur un horizon de temps donné, l'algorithme apprend progressivement ce qu'il doit faire et ne pas faire, pour en déduire une politique de conduite optimale. On comprend que plus la phase d'apprentissage est longue et variée, plus on aura collecté des données de façon exhaustive, et plus le résultat sera satisfaisant.
Dans le calcul de la récompense, on attribue d'abord des pénalités importantes en cas de collision ou de sortie de route, qui doivent être vues comme des échecs à ne pas répéter. D'un autre côté, il faut bien qu'on arrive à destination et éviter une prudence abusive qui à l'extrême consisterait à rester sur place bien à l'abri. On favorise donc également la prise de vitesse et le suivi du bon itinéraire. Ainsi, il existe un compromis entre sécurité et efficacité dans la conduite.
Aujourd'hui, c'est la conduite sur voie rapide ou autoroute qui suscite le plus l'intérêt du secteur automobile. D'une part, il s'agit d'une conduite relativement simple, et d'autre part les trajets sont souvent longs, pénibles et fatigants. Cela constitue donc une application intéressante pour la conduite autonome, surtout si l'on considère le marché que représente le transport routier (camions autonomes). D'après Édouard Leurent, "les techniques classiques obtiennent déjà des résultats satisfaisants sur autoroute, mais la réelle plus-value de l'apprentissage réside dans les situations où les véhicules doivent interagir entre eux, comme aux abords des insertions".
En effet, lorsque des humains cherchent à s'insérer sur une voie rapide, ils jaugent la situation et négocient leur insertion suivant des règles tacites. Même s'il a priorité, le conducteur sur la voie de droite peut ralentir, accélérer ou se déporter à gauche pour permettre l'insertion d'un véhicule. Le programme de conduite autonome doit réussir à anticiper l'effet de ses propres actions sur le comportement des autres, et éventuellement accepter des petites concessions si cela leur facilite la conduite.
L'outil typiquement utilisé pour implémenter numériquement les techniques d'apprentissage est le réseau de neurones virtuels. Ainsi, la politique de conduite n'est pas explicitement écrite quelque part, mais codée à travers les connexions d'un réseau de neurones, ce qui n'est pas "lisible" pour un humain. Pour Philippe Xu, c'est l'inconvénient de l'approche par apprentissage appliquée à la prise de décision. En cas de problème, on ne sait pas pourquoi la machine a mal réagi, tandis que par des approches plus classiques mais moins performantes où l'on code directement le comportement, on peut identifier plus facilement la source du problème.
Discussion
Quand on parle de véhicule autonome, certaines questions sont récurrentes. D'abord concernant la responsabilité : en cas d'accident impliquant une voiture totalement autonome, qui sera considéré responsable ? Par ailleurs, diverses variantes du dilemme du tramway sont formulées : qui doit-on sauver en priorité en cas d'accident imminent ? Le conducteur, les piétons, le plus grand nombre de personnes, les enfants... ? Si on ne doit pas ignorer ces questions éthiques complexes, il faut garder en tête qu'elles ne devraient que rarement se poser. Édouard Leurent rappelle que "ce qu'on attend en priorité de l'ingénieur, ce n'est pas de se demander ce qu'il faut faire quand la collision est inévitable mais plutôt ce qu'il faut faire pour que cette situation arrive le moins souvent possible". Notons que l'Allemagne a esquissé en 2017 un cadre éthique pour réguler la conduite autonome.

À mesure que les algorithmes deviendront plus performants, on pourra s'attendre à l'arrivée progressive de véhicules à autonomie élevée (stades 4 et 5) sur nos routes. À l'image de ce que fait Uber, on pourrait imaginer des flottes de taxis et de camions autonomes donnant lieu à une gestion du trafic optimale. Reste que des réticences fortes sont à attendre de la part des chauffeurs, dont les emplois pourraient être directement menacés par la progression de l'autonomie des véhicules.
Théo Mathurin



{kind=link}